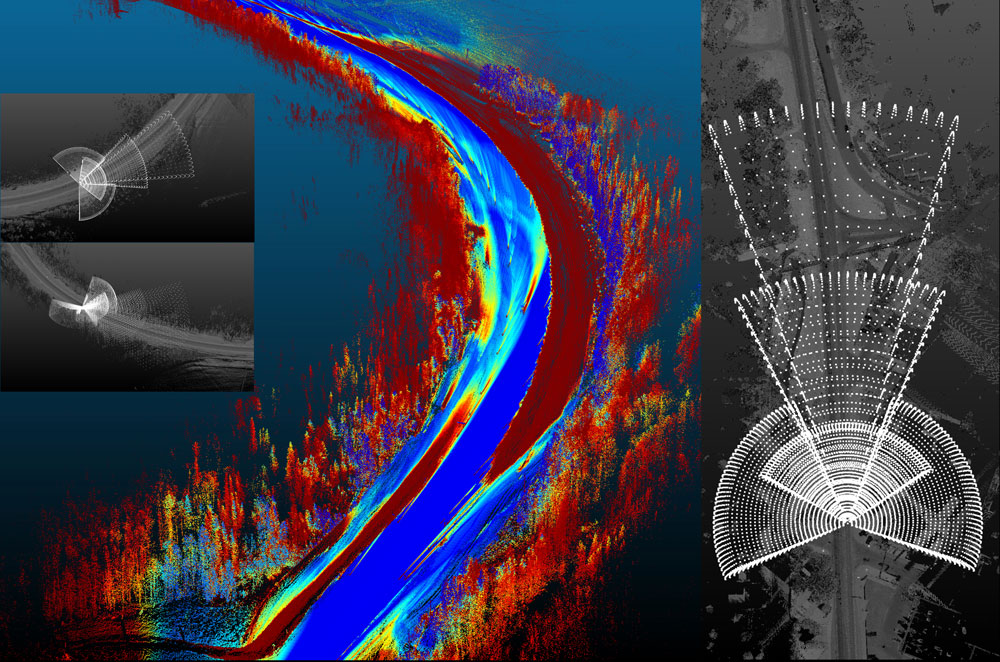
How Autonomous Vehicles See the Road
| Submitted by: | Maged Gouda |
| Collaborators: | Karim El-Basyouny |
| Jehanzeb Mirza | |
| Department: | Civil & Environmental Engineering |
| Faculty: | Engineering |
Connected and Autonomous Vehicles (CAVs) hold the promise to bring about a paradigm shift in transportation safety and mobility. CAVs mimic humans’ behavior. Instead of eyes and brains connected with a nervous system, AVs use sensors and computer systems connected with several types of connections. Sensors collect data about the environment, and the computer system processes the collected data using complex machine learning techniques to take appropriate maneuvers. In my PhD, the interaction between CAVs and the physical environment is investigated at an unprecedented level of detail in practice and research. Multidimensional maps are created by simulating CAV Scenarios in a digitized twin of the existing infrastructure collected using laser scanners. Every point on the map has a unique color that corresponds to seven different dimensions perceived by the award-winning system our team has pioneered. This new approach brings us closer to a fully autonomous smart infrastructure in Canada. The maps are designed to prevent collisions with road-users, non-CAVs, and wildlife animals, solve bottlenecks in state-of-the-art CAV technologies and support smart infrastructure investments.